Vishwa Robotics 2010-2011
![]()
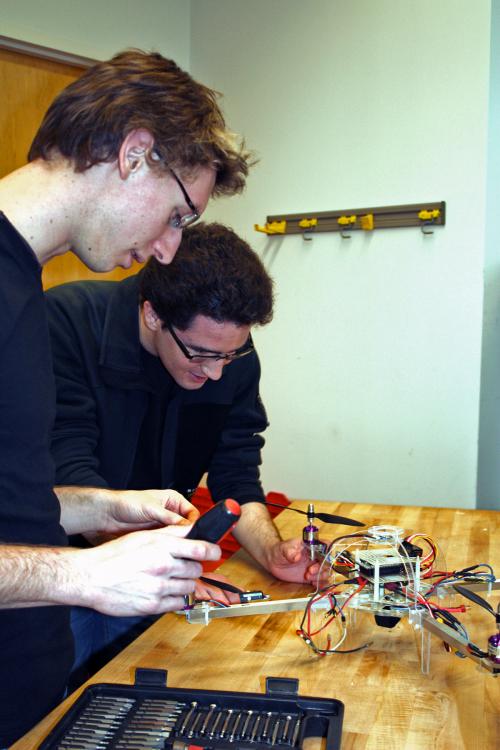
Micro Aerial Vehicle Perching Landing Gear
This SCOPE project began in January 2011 and will conclude in December 2011. The Vishwa Robotics and Automation SCOPE team is working to produce miniature, multi-functional landing gear for Micro Aerial Vehicles (MAVs). By iterating through research, ideation, design, and fabrication, the team will optimize small, lightweight, durable, and low-power landing gear that will enable future MAVs to perch on a variety of surfaces. This is the second phase in an ongoing, multiphase research project awarded to Vishwa Robotics and is being funded by the Air Force Research Laboratory.
Faculty Advisor
Andrew Bennett
Team Members
Abraham Feldman
Clayton Gimenez
Morgan Lavine
Gray Thomas