Student Researchers
- Katya Soltan ’19
- Sean Foley ’19
- Jamie O’Brien ‘21
Collaborator
- Radhika Nagpal, Harvard University
Research Objectives
Developing marine robots is an inherently interdisciplinary pursuit, drawing on knowledge in mechanical engineering, electrical engineering, materials science and computer science. By blurring disciplinary lines, these projects provide opportunities for students with diverse interests and skill sets, and prepare them for future careers in an increasingly multidisciplinary workforce.
Efficiency of miniature robot swimming gait: Optimizing the propulsion of a miniature underwater robot using a bio-inspired swimming gait could lead to improved speed and efficiency. A miniature multi-jointed underwater robot is being developed to replicate the undulatory body motions of fish. The robot utilizes low-cost and waterproof magnet-in-coil actuators and is controlled by an Arduino.
Position sensing and feedback control of magnet-in-coil actuators: The magnet-in-coil actuators used in the miniature robotic fish are well suited for underwater swarm robotics due to their low-cost, small size and waterproof construction. At present, a simple yet inefficient bang-bang control strategy is used to regulate the current through the coils. The addition of a sensor to monitor the position of the actuator would enable feedback control and allow for optimized swimming performance.
Impact
Exploring the ocean and collecting data to make informed decisions about its protection is an integral part of being good stewards of one of our most valuable resources. An important aspect of this responsibility is observing the state of the environment in the context of the marine species that it most immediately affects. To gather data from an inhabitant-scale perspective, a robot agent whose size and maneuverability approaches that of the small fish living in the ecosystem is needed. These robots could be assembled into a distributed sensing network, creating opportunities to venture into fragile ecosystems like coral reefs, collect data over large areas and easily scale search and sense missions.
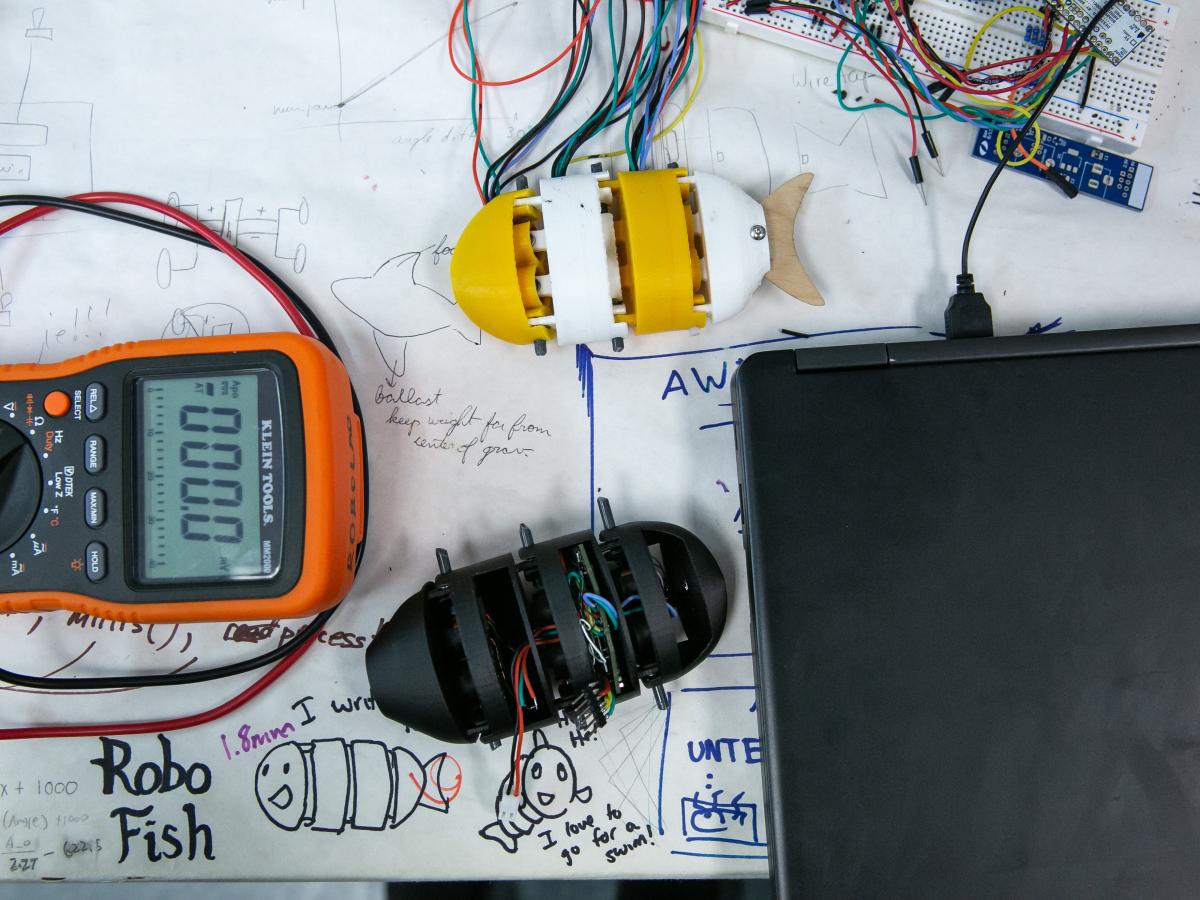
A Miniature Low-cost Underwater Robot
The underwater robot design uses low-cost magnet-in-coil actuators, which have a small profile and minimal sealing requirements. This allows us to create a small (10cm) robot with multiple flapping fin propulsors that independently control robot motions in surge, heave, and yaw.
