September 13, 2018
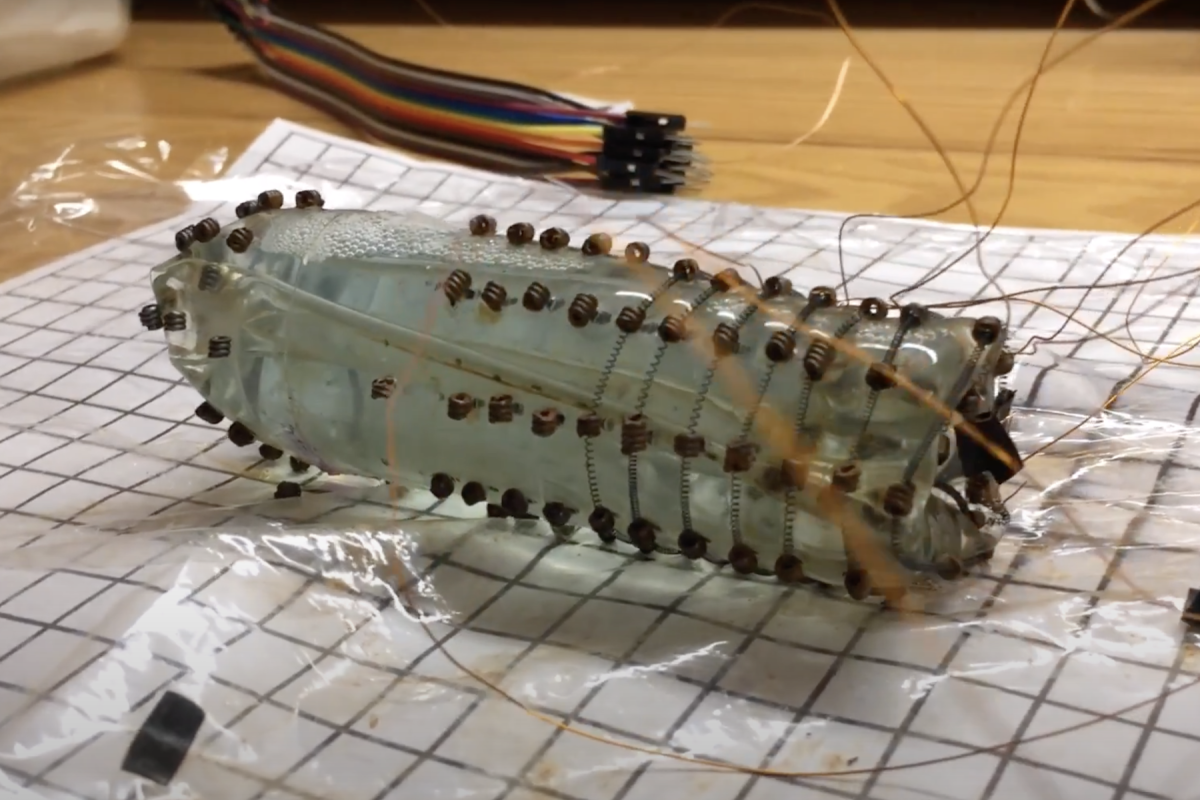
This little guy is an inverting torus, which just happened to win the 2018 Soft Robotic Design Competition. Three Olin students, Junwon Lee, Cameron Wierzbanowski and Harrison Young submitted the design.
Here is a statement from their project: "We intend to experimentally examine the feasibility of whole skin locomotion (WSL) through the posterior contraction of an elongated fluid filled torus (FFT). Whole skin locomotion “works by way of an elongated toroid, which turns itself inside out in a single continuous motion, effectively generating the overall motion of the cytoplasmic streaming ectoplasmic tube in amoebae.”[1] In WSL, the entire exterior of the torus moves in the same direction. This is significant because it allows any surface the torus comes into contact with, top, bottom, or side, to be used to propel the torus forward."
The purpose behind the team's design is: Exploring the feasibility of using whole skin locomotion to facilitate the single continuous movement of an elongated fluid filled torus. Using shape memory alloy as contractile rings, this prototype allows the torus to inch forward due to posterior contraction.
Watch: The team's designed inverting torus for the 2018 Soft Robotic Design Competition.